

飛行器三維路徑規劃
1.概述
空間管控問題是軍航、民航、通航以及無人機航空業界備受關注的問題。隨著飛行器數量越來越多,特別是隨著低空領域的開放,空管壓力越來越大。飛行器運動規律變化復雜,航路規劃的計算遇到瓶頸,傳統方法普遍以經緯度為基礎,通過解算三維曲線方程加安全裕度的方法,來實現對空間對象的航路規劃和管控,計算復雜度高,已無法適應飛行器快速增多的變化。方案基于北斗網格碼進行三維路徑的規劃,有效降低計算復雜度,使空間管控更加實時、高效。
2.解決方案
用靜態立體網格承載三維空間信息,時間維作為變量,將空間內有無人機的網格標記為1,沒有的標記為0;在三維靜止空間中,根據無人機之間安全飛行距離和飛行時間變量,找到任意一條和現有運動目標靜止軌跡(時空軌跡)不相交的立體網格直線(曲線)區域,反向轉換成無人機在三維立體空間的運動狀態,即可規劃出任意動態的無人機飛行路徑,并能將飛行空域的利用率達到最大。
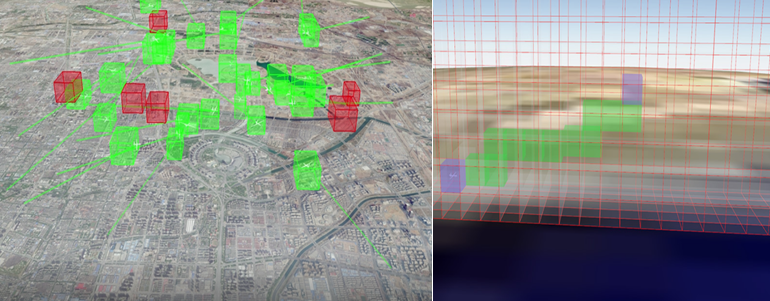
圖1 三維路徑規劃示意圖
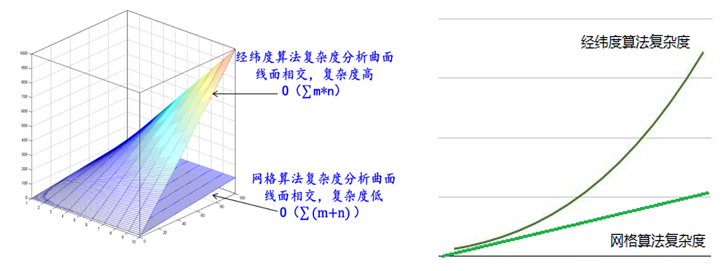
圖2 計算復雜度對比
3.優勢特點
(1)將復雜的浮點運算問題變成一個空間網格的匹配問題,空間飛行規劃計算效率提升10倍以上;
(2)保持空間計算效率的平衡,算法復雜度呈線性變化,不隨空間對象的數量、分布及運動規律的變化而變化;
(3)空域利用率提升1倍以上;
(4)具有全空域性,支持整個地球空間的空間管控。



